IAS Lab - FRoG Group
Post-Doctoral Research Fellow
11/2025 - 11/2026




Post-Doctoral Research Fellow at
Department of Information Engineering,
University of Padua.
Working with Prof. Alberto Pretto and collaborating with Prof. Loris Nanni.
Post-Doctoral Research Fellow
11/2025 - 11/2026Ph.D. Student (cum Laude)
11/2022 - 03/2026Visiting Ph.D.
03/2024 - 09/2024Post-Graduate Research Fellow
02/2022 - 10/2022Post-Graduate Collaborator
11/2021 - 02/2022

|
µ-Learn: A Lightweight, On-Device Machine Learning Library for Educational Robotics Platforms
Robotics in Education (RiE), 2026
|

|
Introducing Machine Learning to Middle-school Students with Edge-AI in an Educational Robot
Robotics in Education (RiE), 2026
|
|
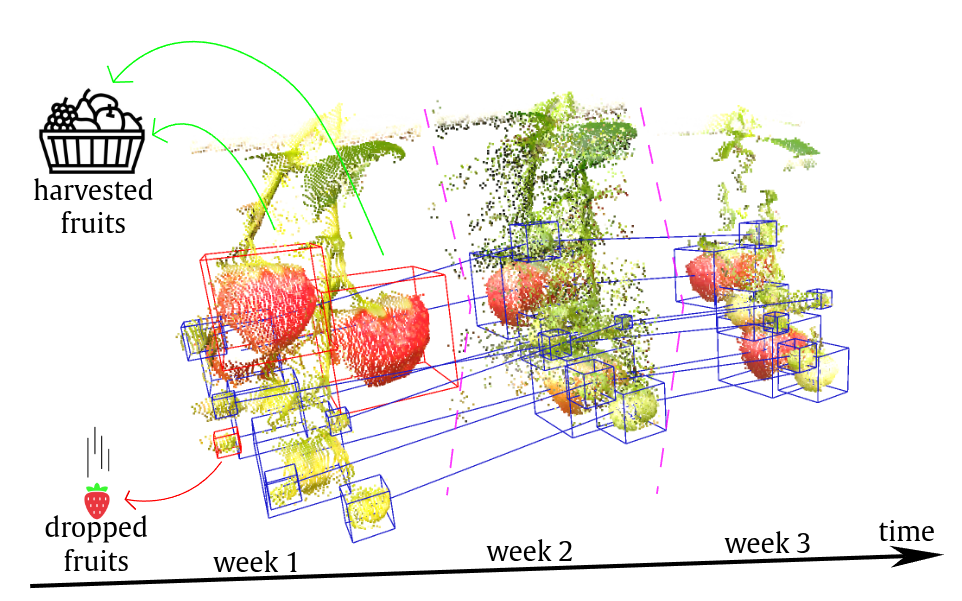
Horticultural Temporal Fruit Monitoring via 3D Instance Segmentation and Re-Identification using Colored Point Clouds
Computers and Electronics in Agriculture, 2026
|
|
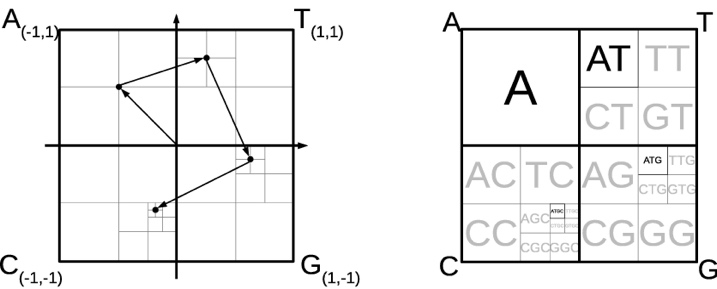
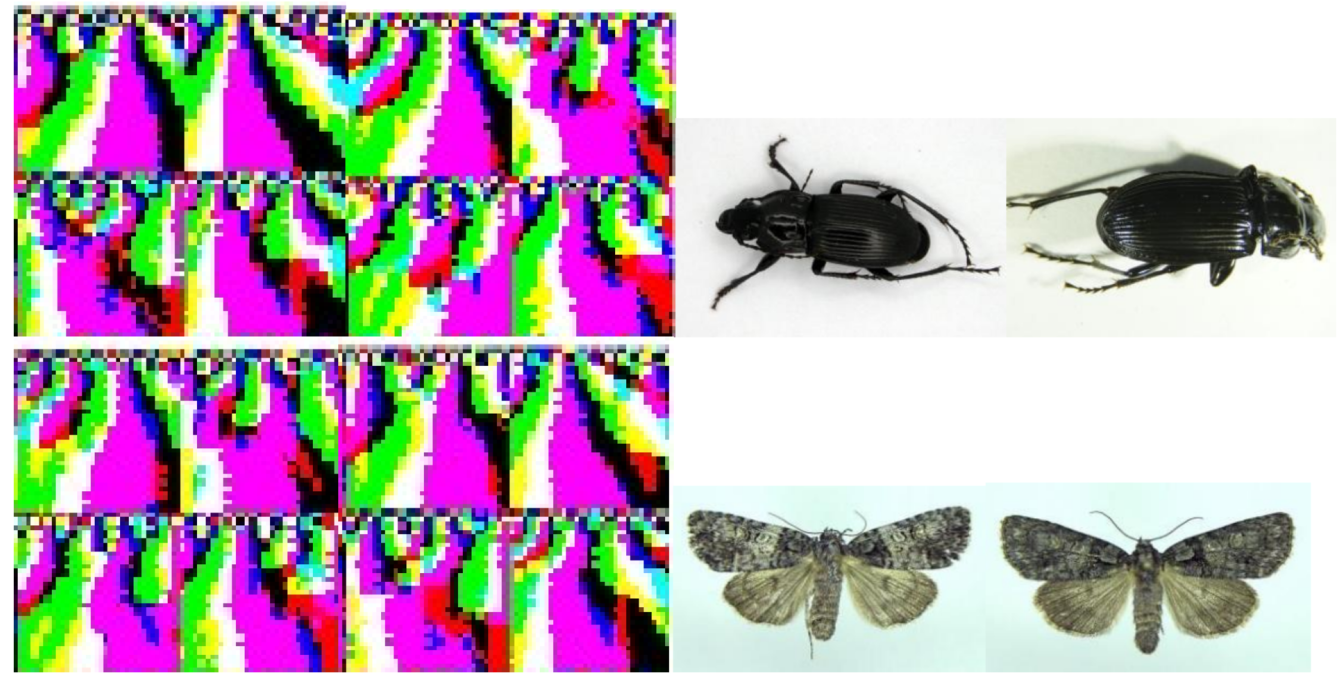
BarcodEnsemble: Leveraging Deep Learning Ensembles for DNA-Based Taxonomic Classification
Submitted to IEEE/ACM Transactions on Computational Biology and Bioinformatics, 2026
|
|
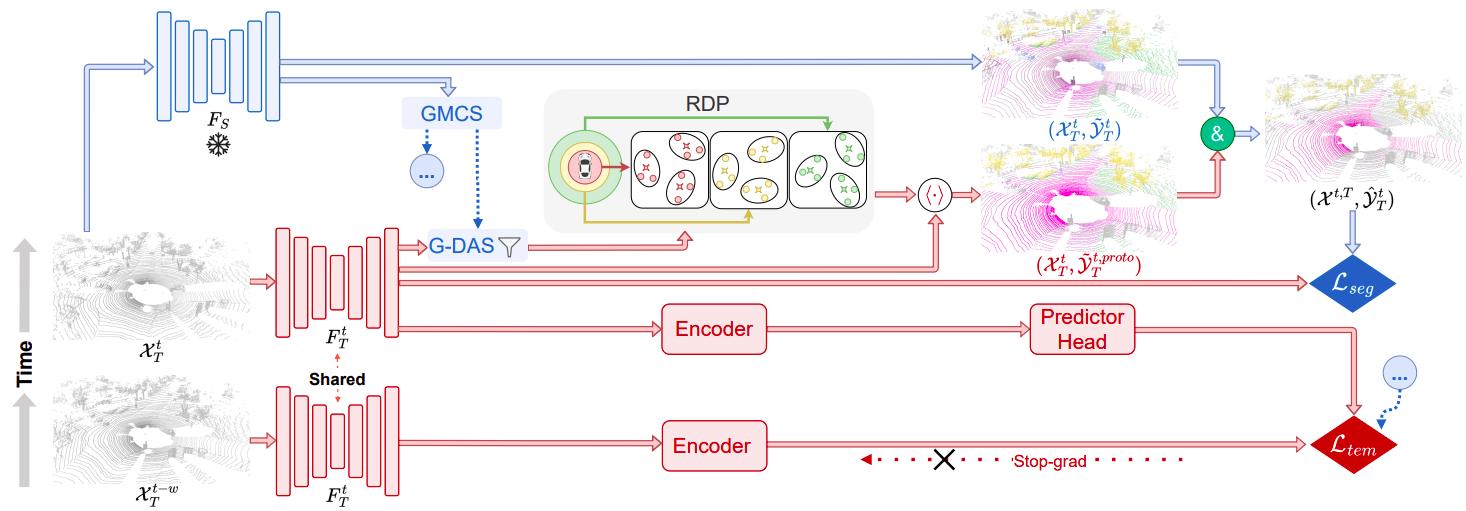
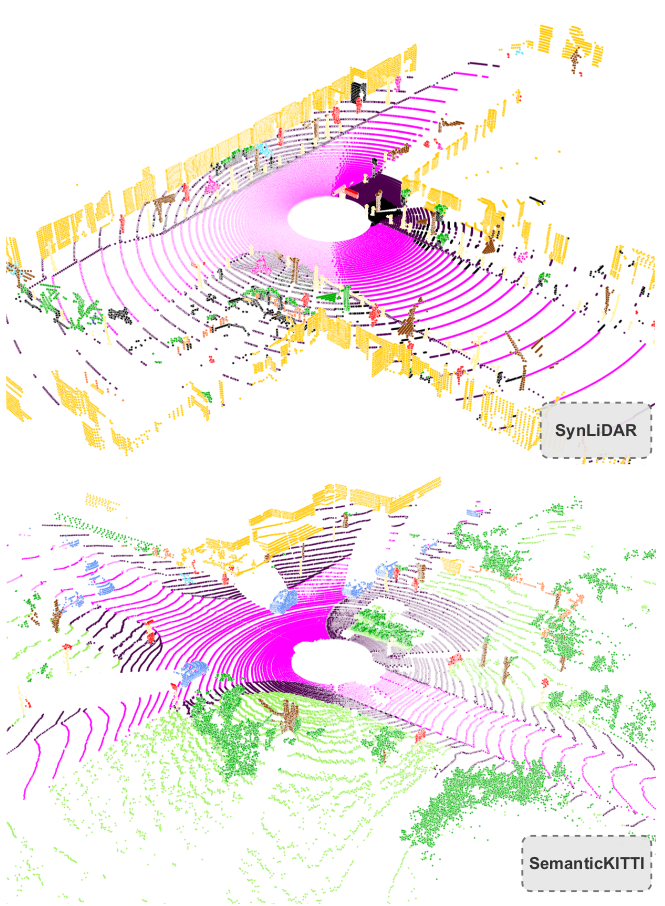
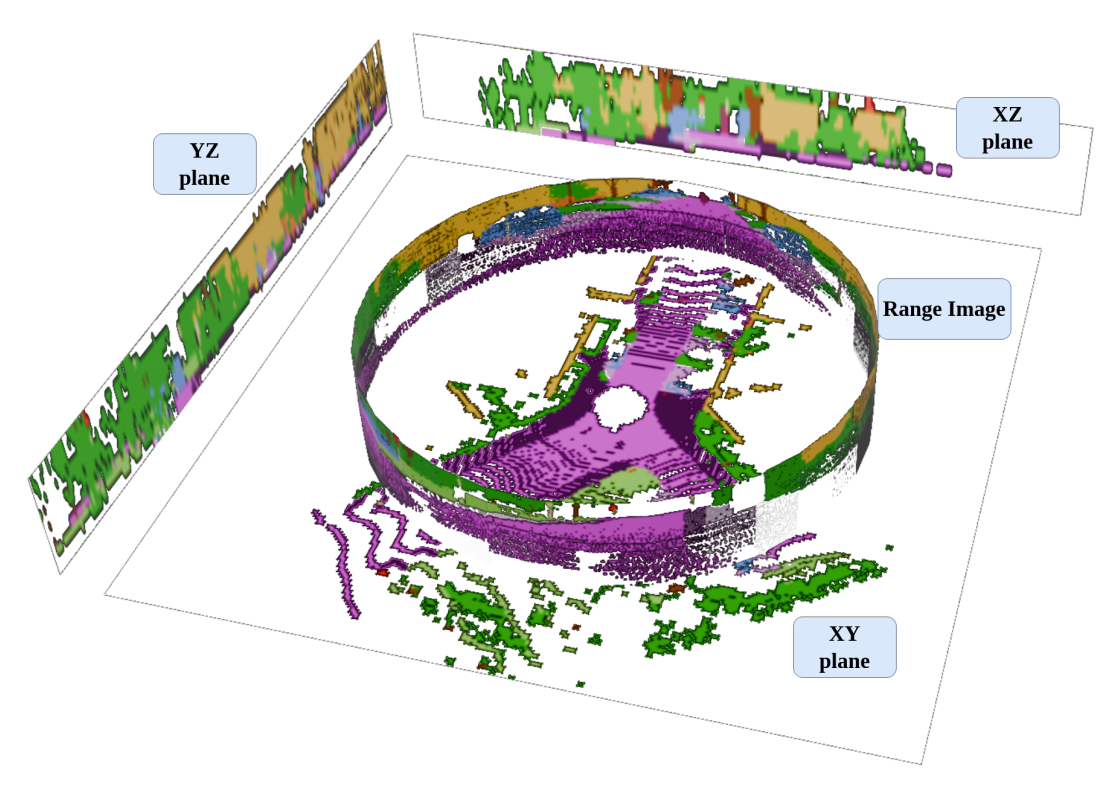
Geometry- and Consistency-Guided Test-Time Adaptation for Robust Synthetic-to-Real LiDAR Segmentation in Autonomous Driving
Submitted to IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2026
|
|
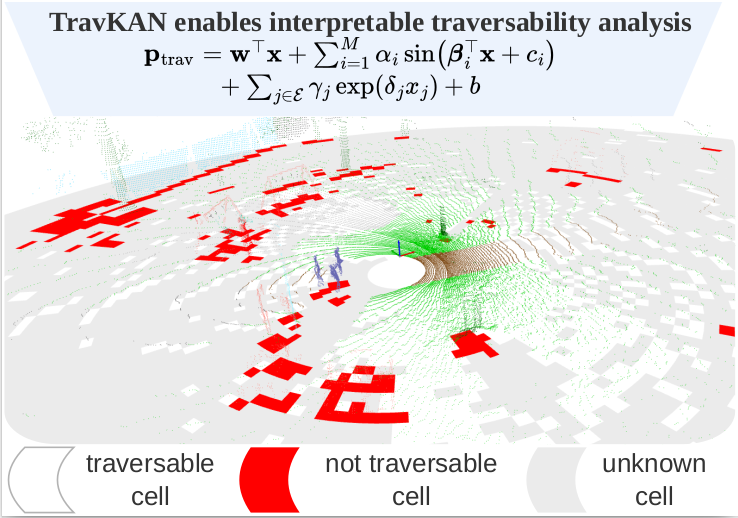
TravKAN: Fast and Interpretable Nonlinear Traversability Analysis with Kolmogorov-Arnold Networks
Accepted for publication! IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
|
|
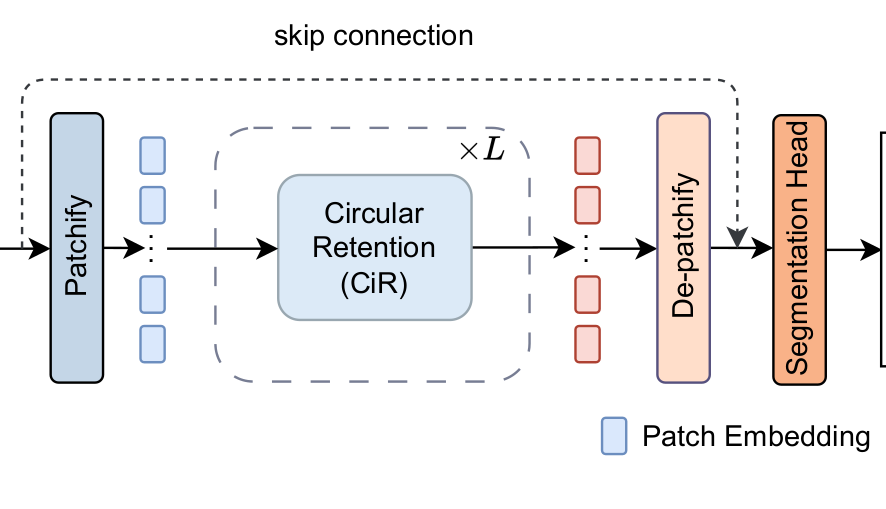
Revisiting Retentive Networks for Fast Range-View 3D LiDAR Semantic Segmentation
Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2026
|
|
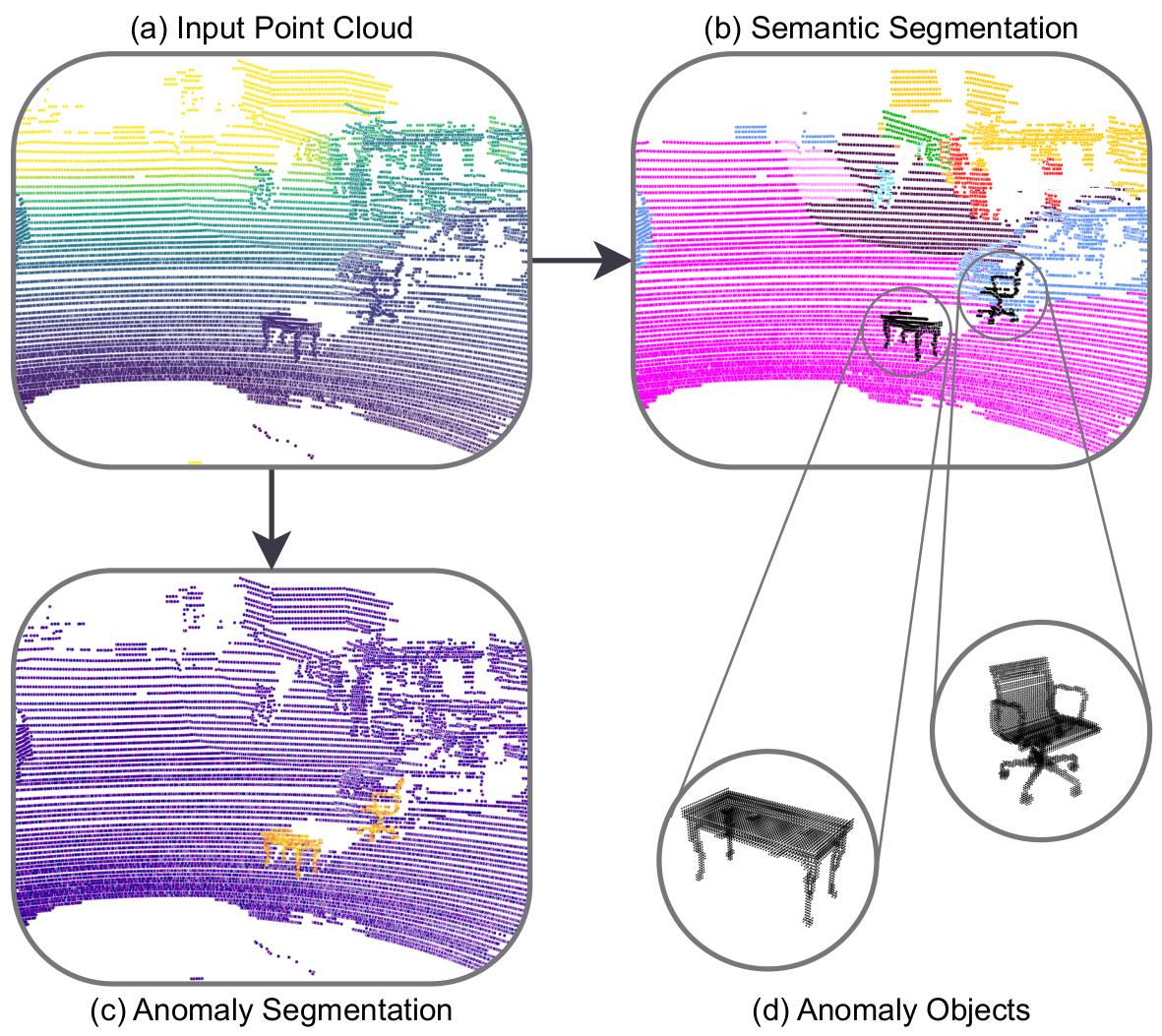
Learning to Identify Out-of-Distribution Objects for 3D LiDAR Anomaly Segmentation
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
|
|
Ensemble Deep Learning Models on Raw DNA Sequences for Viral Genome Identification in Human Samples
Sensors, 2026
|
|
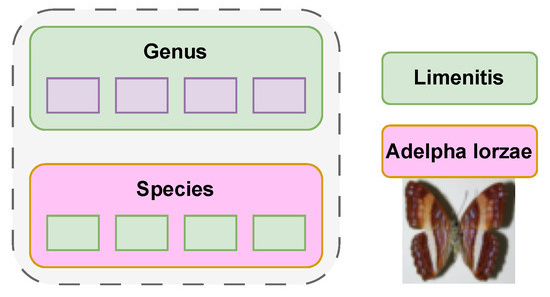
Advancing Taxonomy with Machine Learning: A Hybrid Ensemble for Species and Genus Classification
Algorithms, 2025
|
|
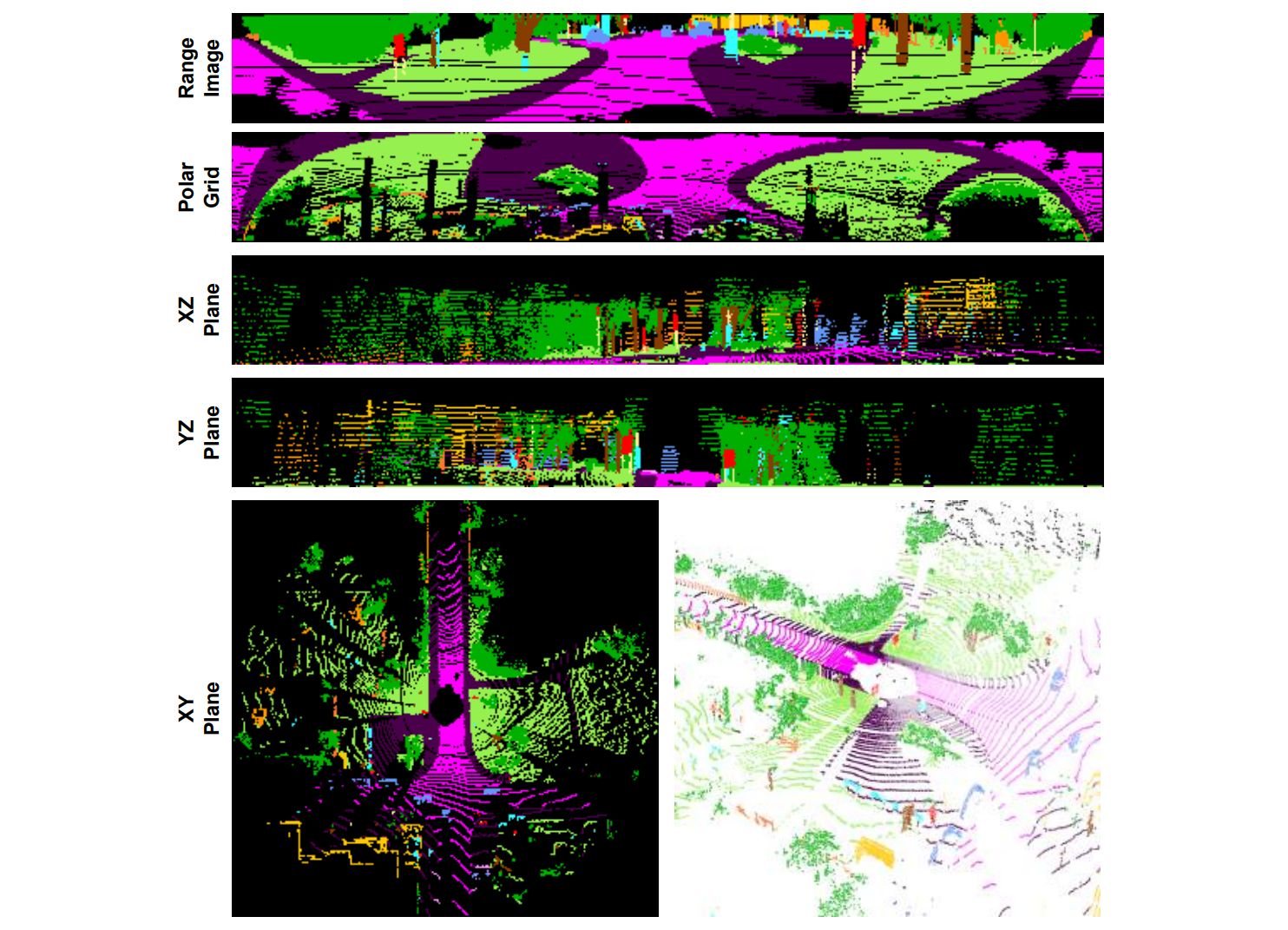
Point-Plane Projections for Accurate LiDAR Semantic Segmentation in Small Data Scenarios
Submitted to Computer Vision and Image Understanding (CVIU), 2025
|
|
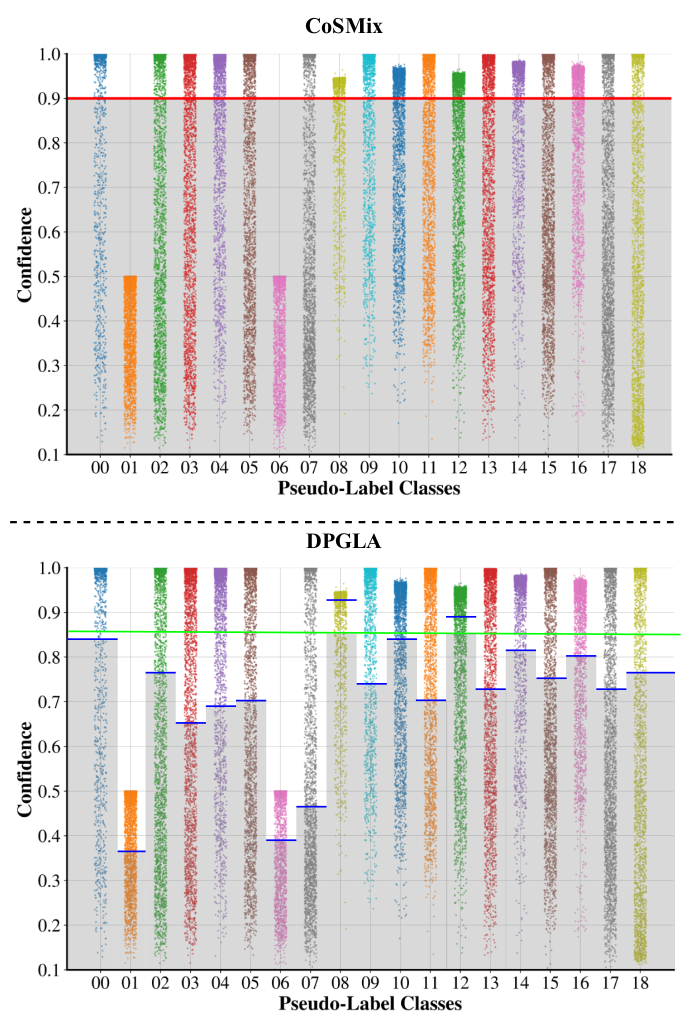
DPGLA: Bridging the Gap between Synthetic and Real Data for Unsupervised Domain Adaptation in 3D LiDAR Semantic Segmentation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
|
|
|
Matrix-Based Vector Representations in Neural Networks for Classifying Molecular Biology Data
Bioinformatics Advances, 2025
|
|
Insect Identification by Combining Different Neural Networks
Expert Systems with Applications, 2025
|
|
ConUDA: Confidence-Guided Pseudo-Label Sampling for Unsupervised Domain Adaptation in 3D LiDAR Semantic Segmentation
European Conference on Mobile Robots (ECMR), 2025
|
|
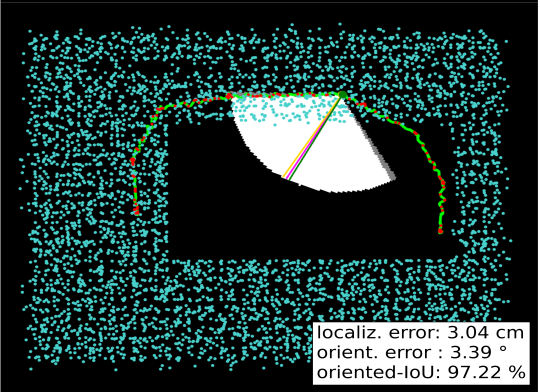
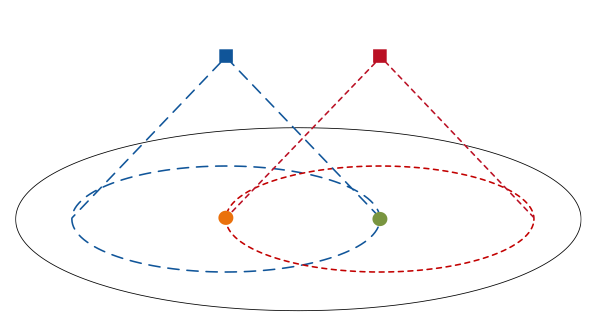
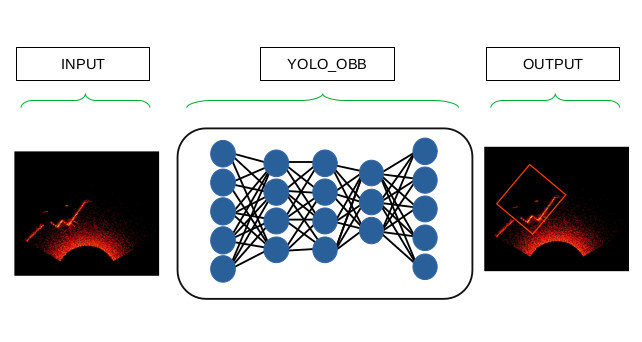
Real-time Underwater Place Recognition in Synthetic and Real Environments using Multibeam Sonar and Learning-based Descriptors
IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), 2025
|

|
Spatio-Temporal Consistent Semantic Mapping for Robotics Fruit Growth Monitoring
IEEE Robotics and Automation Letters, 2025
|
|
|
Sample Size for Training and Testing: Segment Anything Models and Supervised Approaches
Advances in Intelligent Healthcare Delivery and Management, 2024
|
|
P-SVM2: Enhancing LiDAR-based Traversability Analysis with Augmented Point Cloud Descriptor for Autonomous Mobile Systems
IEEE Int. Conf. on Cybernetics and Intelligent Systems (CIS) and Robotics, Automation and Mechatronics (RAM), 2024
|
|
Exploiting Local Features and Range Images for Small Data Real-Time Point Cloud Semantic Segmentation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
|
|
A Sonar-based AUV Positioning System for Underwater Environments with Low Infrastructure Density
IEEE ICRA Workshop on Field Robotics, 2024
|
|
Improving Existing Segmentators Performance with Zero-Shot Segmentators
MDPI Entropy, 2023
|
|
Improving Generalization of Synthetically Trained Sonar Image Descriptors for Underwater Place Recognition
IEEE International Conference on Computer Vision Systems, 2023
|
|
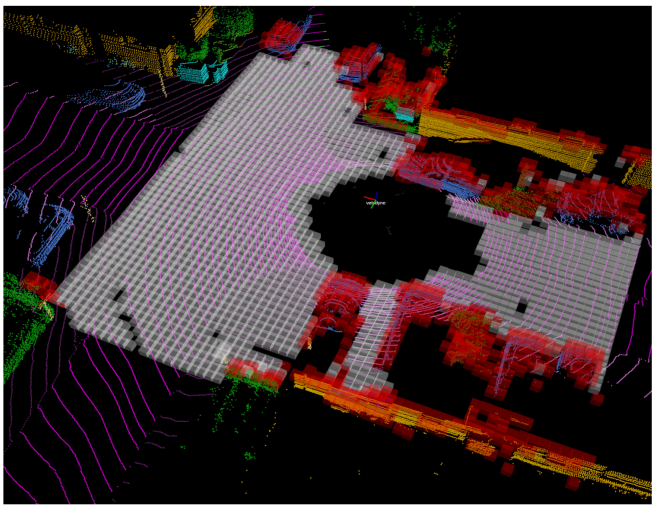
Pyramidal 3D feature fusion on polar grids for fast and robust traversability analysis on CPU
Robotics and Autonomous Systems, 2023
|
|
Real-time Free Space Semantic Segmentation for Detection of Traversable Space for an Intelligent Wheelchair
Int. Conf. on Rehabilitation Robotics (ICORR), 2022
|
|
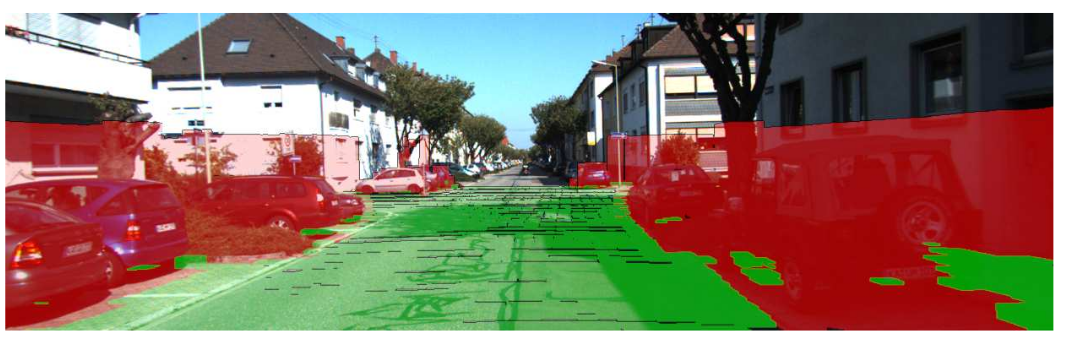
An Hybrid Approach to Improve The Performance of Encoder-Decoder Architectures for Traversability Analysis in Urban Environments
IEEE Intelligent Vehicles Symposium (IV), 2022
|
|
Pushing the Limits of Learning-based Traversability Analysis for Autonomous Driving on CPU
Int. Conf. on Intelligent Autonomous Systems (IAS), 2022
|

|
LOUIS: Low-Cost Intraoral Scanning
2025--present
|
|
|
Progetto DIGA: un ecosistema sostenibile per la formazione e l'orientamento
Department of Information Engineering (DEI), 2025/2026
|

|
SubEye: Underwater Perception
Saipem S.p.A., 2022--2024
|


